Su altı keşif teknolojileri, oşinografi, çevresel izleme, altyapı denetimi ve savunma sanayii gibi birçok alanda giderek daha kritik bir rol oynamaktadır. Bu proje kapsamında, otonom ve uzaktan kumandalı olarak çalışabilen, yüksek manevra kabiliyetine sahip bir İnsansız Su Altı Aracı geliştirilmiştir. Sistem, özgün elektronik donanımı, gelişmiş sensör füzyonu ve gerçek zamanlı görüntü işleme yetenekleriyle su altı operasyonlarında güvenilir ve verimli bir çözüm sunmayı amaçlamaktadır.
Proje Kapsamı ve Geliştirilen Sistemler
Proje, aracın temel bileşenlerinden başlayarak entegre bir sistem haline getirilmesine kadar uzanan kapsamlı bir mühendislik sürecini içermektedir:
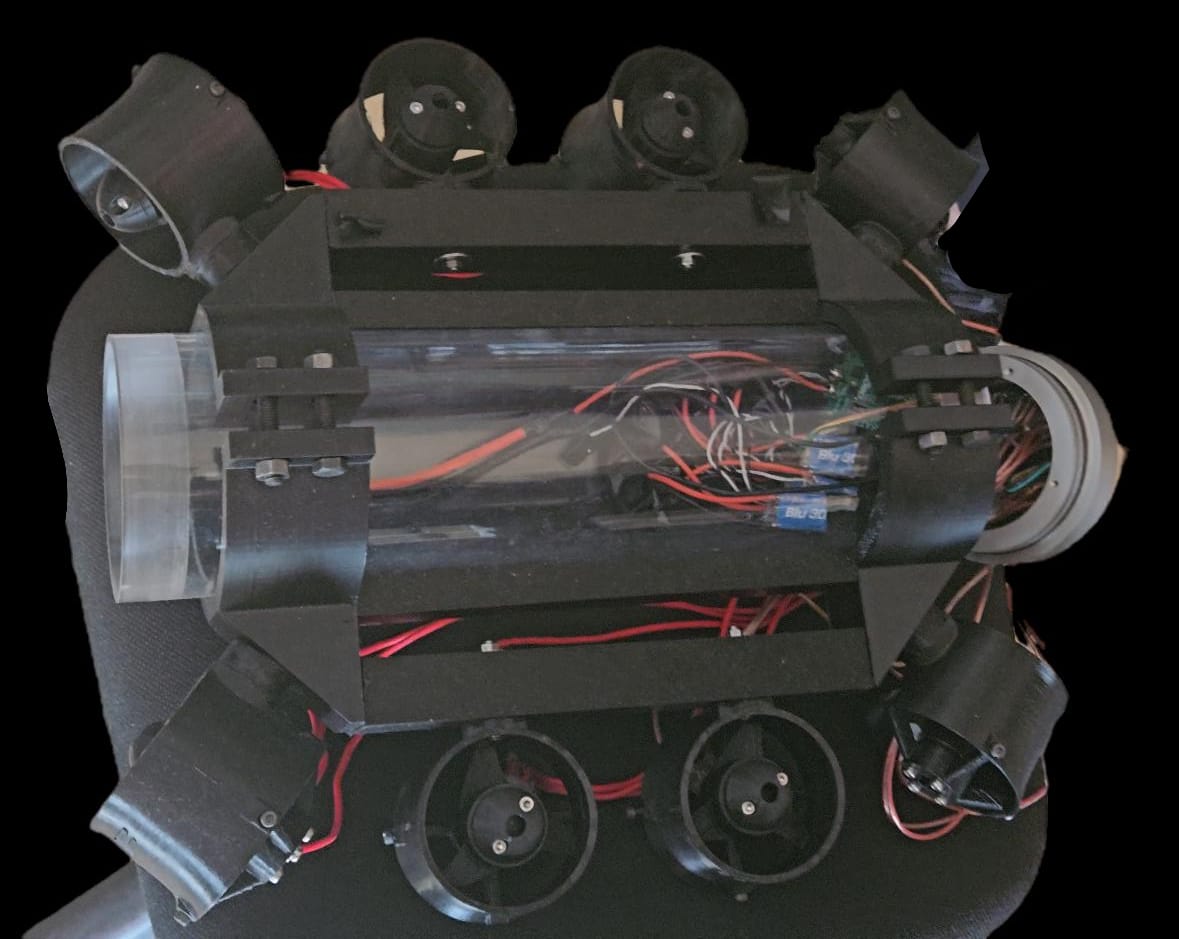
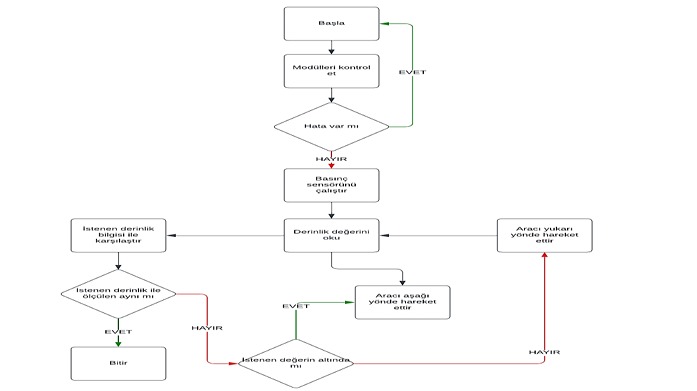
Elektronik Tasarım ve Gömülü Sistemler: Aracın beyni olarak hizmet veren özgün bir kontrol kartı tasarlandı ve üretildi. Bu kart, çeşitli sensörlerden (derinlik, sıcaklık, ataletsel ölçüm birimi - IMU) gelen verileri işleyerek aracın kararlı ve otonom hareket etmesini sağlamaktadır. Elektronik hız denetleyicileri (ESC) ve güç yönetim modülleri de yerel olarak tasarlanarak sistemin verimliliği ve güvenilirliği artırılmıştır.
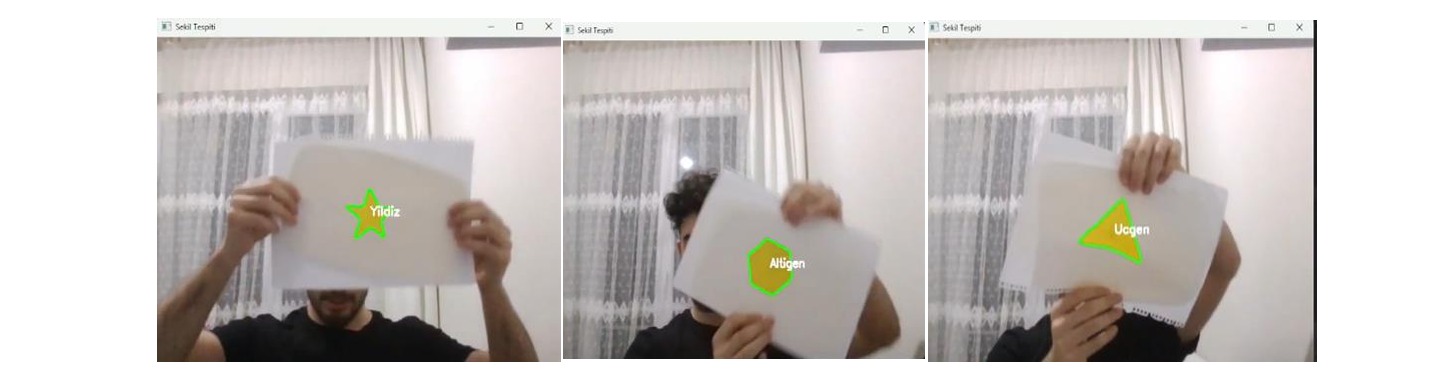
Görüntü İşleme ve Algılama: Araç üzerinde bulunan kameralardan alınan su altı görüntüleri, gerçek zamanlı olarak işlenmektedir. Geliştirilen algoritmalar sayesinde görüntüdeki bulanıklık giderilmekte, kontrast iyileştirilmekte ve hedef nesneler (boru hatları, su altı canlıları, enkazlar vb.) tespit edilebilmektedir.
ROV Entegrasyonu ve Kontrol Yazılımı: Aracın uzaktan kumanda (ROV) modunda kararlı bir şekilde kontrol edilebilmesi için kullanıcı dostu bir yer istasyonu yazılımı geliştirilmiştir. Bu yazılım, araçtan gelen sensör verilerini, canlı video akışını ve sistem durumunu anlık olarak kullanıcıya aktarırken, aynı zamanda araca pürüzsüz komutlar göndermeyi mümkün kılmaktadır.
Teknik Özellikler ve Yenilikçi Yaklaşım
Otonom Navigasyon: Önceden tanımlanmış görevleri, sensör verilerini kullanarak insan müdahalesi olmadan yerine getirebilme.
Gerçek Zamanlı Veri İşleme: Gömülü sistem üzerinde çalışan algoritmalarla anlık görüntü iyileştirme ve nesne tespiti.
Modüler Tasarım: Sistemin, farklı görevlere uyum sağlamak için yeni sensörler veya araçlar ile kolayca genişletilebilir olması.
Uygulama Alanları
Geliştirilen bu AUV sistemi, aşağıdaki alanlarda doğrudan operasyonel destek sağlayabilir:
Bilimsel Araştırmalar: Deniz biyoçeşitliliği haritalama, su kalitesi ölçümü.
Endüstriyel Uygulamalar: Boru hatları, kablo döşemeleri ve su altı yapılarının denetimi.
Arama-Kurtarma Operasyonları: Su altı enkaz taraması.
Savunma ve Güvenlik: Liman güvenliği ve su altı tehdit algılama.